
تفاوت میان سرو موتورها با استپ موتور ها در چیست؟
سروو موتور (servo motor) یک الکترو موتور است که ادوات الکترونیکی دیگر مانند درایو ها در کنار آن قرار دارد و تغذیه آن میتواند بسته به نیاز dc یا ac باشد. ساختار سروو موتور ها به صورت حلقه بسته (close loop) میباشد که به ما از سیستم به منظور کنترل سرعت فیدبک بدهد. از انکدر ها به منزله سنسور استفاده میکنیم که این انکدر ها درون خود موتور تعبیه شدهاند.
چه زمانی از سرووموتور به جای الکتروموتور استفاده میکنیم؟ به علت قیمت بالای سروو موتور ها به نسبت الکتروموتور ها در جایی که دقت برای ما مطرح است از سروو موتورها استفاده میکنیم.
از سروو موتور های DC بیشتر در جاهای خاص مثل شناور (صنایع دریایی) استفاده میشود.
سروو موتور DC به صورت مکانیکی (با استفاده از کموتاتور) یا به صورت الکترونیکی (بدون جاروبک یا brushless (عمل کموتاسیون را انجام میدهد. موتورهای دارای جاروبک معمولاً ارزانتر هستند و عملکرد آنها سادهتر است اما موتورهای بدون جاروبک قابل اعتمادتر هستند یا به عبارتی reliability و بازده بیشتری دارند.
حال کموتاتور چیست؟ یک کلید الکتریکی دورانی است که به صورت تناوبی جهت جریان بین روتور و مدار راه انداز را عوض میکند. ساختمان کموتاتور از یک حلقه استوانهای متشکل از چند بخش کنتاکت فلزی روی روتور تشکیل شده است. دو یا چند کنتاکت الکتریکی که به آن ها براش یا جاروبک میگوییم از یک ماده هادی مانند کربن ساخته شده اند و و محل قرار گیری آن ها در مقابل کموتاتور است.
سرو موتور ها دو نوع گیربکس دار (with gear) بدون گیربکس (without gear) هستند.
اندازه های کوچک : پروژه های رباتیک و مکاترونیکی
اندازه های بزرگ: دستگاه های CNC
نوع دیگر سروو موتورها بجای کار به صورت دورانی، به صورت خطی شکل کار میکنند و روش کار به این صورت است که سروو موتور به یک گیربکس متصل است که حرکت دورانی را به حرکت خطی تبدیل میکند. به این نوع سروو های خطی گفته میشود.
هم سرو موتور و هم استپ موتور همزمان می توانند موقعیت را کنترل کنند. به طور کلی، استپ موتور ها برای مواردی که نیاز به سرعت کم در مسافت کوتاه باشد ، مناسب هستند که در کنترل موقعیت به دقت زیادی نیاز نیست.
از طرف دیگر، سرو موتور ها در مواردی که نیاز به دقت بالا در کنترل موقعیت ، حرکت در مسافت طولانی و در مواردی که نیاز به تولید گشتاور زیاد با سرعت بالا است، کمک می کنند.
استپ موتورها به دلیل ساختار ساده خود ارزان قیمت هستند، در حالی که سرو موتور ها نسبتاً گران هستند زیرا برای شناسایی موقعیت نیاز به رمز گذار و انکدر دارند.
با این حال، سرو موتور ها با توجه به کارایی که دارند، باعث صرفه جویی در مصرف انرژی می شوند و این امر منجر به کاهش هزینه های در حال اجرا می شود.
سرو موتور ها
سروو موتورها بر اساس مکانیسم های کنترل فیدبک کار میکنند. آنها در ارائه حرکات دقیق و سریع مهارت دارند. سروو موتورها در کاربردهایی که به دقت بالا و چرخش مداوم نیاز دارند برتری دارند. این موتورها برای تنظیم مداوم سرعت و موقعیت به بازخورد موقعیت متکی هستند. آنها معمولاً در صنایعی مانند رباتیک، تولید و ماشینهای CNC یافت میشوند.
استپ موتورها
از طرف دیگر، موتورهای پله ای با تبدیل پالس های دیجیتال به حرکات یا مراحل مکانیکی گسسته عمل میکنند. برخلاف سروو موتورها، موتورهای پله ای برای کنترل حرکت نیازی به رمزگذار یا سیستم بازخورد ندارند. استپ موتورها به دلیل سادگی و مقرون به صرفه بودن معروف هستند. آنها اغلب در برنامه هایی استفاده میشوند که به دقت کم تا متوسط نیاز دارند، مانند چاپگرهای سه بعدی، اسکنرها و پلاترها.
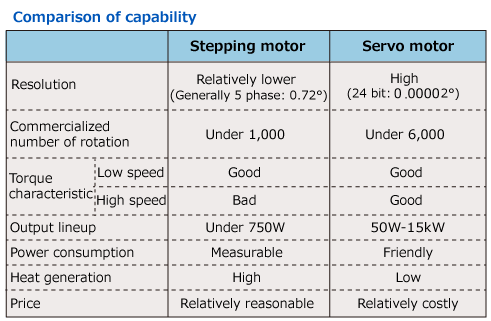
تفاوت در وضوح بسته به مکانیسم های چرخشی
در مورد استپ موتور های برقی، بر روی موتور دندانه های كوچكی قرار دارد تا بسته به دندانه های كوچك (زاویه پله) موقعیت یابی كند. درایور بر اساس زمان ورودی سیگنال پالس در کنترلر به عنوان فرمان موقعیت یابی، سیگنال های فرمان را به سمت موتور تولید می کند.
موتور در زاویه مرحله طراحی شده (وضوح) می چرخد. با این حال، وضوح محدود است زیرا نیاز به دقت بالای ماشینکاری دارد. در مورد سرو موتورها ، بر روی موتور یک انکدر را سوار می کنند و مکانیزمی برای بازخورد موقعیت چرخش بازخورد و سرعت محور موتور به درایور (تقویت کننده) دارد.
درایو انحراف دستورات در موقعیت / سرعت و سیگنال های بازخورد (موقعیت / سرعت فعلی) از انکودر را محاسبه می کند و چرخش موتور را کنترل می کند تا انحراف “0” را حفظ کند. سرو موتور ها توسط این مکانیزم از وضوح بالایی برخوردار هستند .
تفاوت در ویژگی های گشتاور بسته به سیستم های کنترل
استپ موتور ها دارای سنسور تشخیص موقعیت مانند انکدر نیستند، در عوض آنها عملکرد سیستم بین درایو و موتور را با سیستم حلقه باز کنترل می کنند؛ بنابراین، هنگامی که گشتاور مجاز یا بیشتر از بیرون به محور اعمال شود، می تواند باعث آسیب به موتور شوند.
از طرف دیگر، سرو موتور ها همیشه بازخورد اطلاعات موقعیتی را از انکدر بین درایور و موتور دارند و عملکرد را با سیستم حلقه بسته کنترل می کنند؛ بنابراین، آنها می توانند نوسان موقعیت موقتی را به دلیل نیروی خارجی بیش از میزان مجاز، اصلاح کنند و وضعیت را از جمله سیگنال های تکمیل موقعیت یابی را بررسی کنند.
علاوه بر این، سرو موتور ها قادر به تولید گشتاور لازم هم در سرعت پایین و هم در سرعت بالا هستند. اگرچه استپ موتور ها در سرعت پایین گشتاور بالایی ایجاد می کنند، اما در سرعت های بالا، گشتاورشان کم می شود.
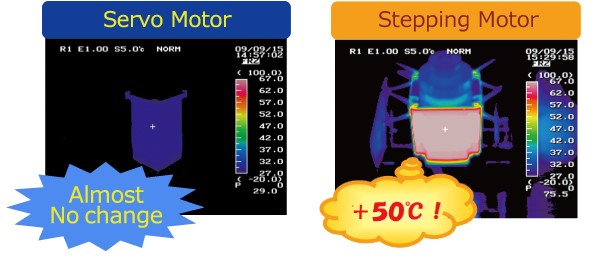
تفاوت در مصرف برق و تولید گرما بسته به سازه ها
استپ موتور های برقی هنگام کار یا توقف ، جریان جریان الکتریکی را از طریق موتورها در سطح معینی نگه می دارند؛ و اتلاف آن بسته به سرعت چرخش موتور افزایش می یابد، به طوری که هم باعث افزایش مصرف برق و هم تولید گرما برای آن می شود.
از طرف دیگر، سرو موتور ها بر خلاف استپ موتور ها نیاز به جریان الکتریکی دارند که تنها با انحراف مطابقت دارد، قادر است مصرف برق را کاهش داده و تولید گرمای موتور را سرکوب کند، زیرا در مواقعی که موتور متوقف شده یا با سرعت ثابت کار می کند، به مقدار کمی جریان الکتریکی احتیاج دارد.
تفاوت درایوهای AC و servos در چیست؟
هر دو درایو AC و سرو تجهیزات کنترل موتور هستند. هر دو عملکرد اصلی را دارند که با تبدیل نیرو از منابع قدرت تجاری، کنترل ولتاژ (جریان) و فرکانس، موتورها را با سرعت مورد انتظار می چرخانند. مشتریان بسته به عملکرد و عملکرد مورد نیاز خود، یکی از این موارد را انتخاب می کنند.
درایوهای AC فرمان کاملی از سرعت چرخش موتور دارند و قدرت پایداری را تأمین می کنند. آنها بطور مداوم با اجرای کارکردهایی که قبلاً به عنوان استاندارد کنترلر میزبان کنترل می شدند، پیشرفت می کنند. علاوه بر این، اینورترهای سری 1000 یاسکاوا می توانند انواع مختلفی از موتورها رو کنترل کنند.
آنها قادر به کنترل نه تنها موتورهای القایی عمومی بلکه موتورهای سنکرون (با یا بدون کارت PG) هستند.
از طرف دیگر، servos ها موتورها را کنترل می کنند تا بتوانند سریعاً به دستورات موقعیت و سرعت پیگیری کنند. موتور، موتور اختصاصی همزمان را که همراه انکودر است کنترل می کند.
تفاوت بین موتورهای القایی و موتورهای سنکرون چیست؟
موتور وسیله ای الکتریکی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل می کند. بیایید تفاوت بین موتورهای القایی و موتورهای سنکرون را از منظر تفاوت اصول چرخش، از نظر موتور که در میدان مغناطیسی در حال چرخش تولید شده توسط منبع ای سی می چرخد، ببینیم.
در مورد موتورهای القایی، وقتی روتور تشکیل شده توسط سیم پیچ فلزی را در میدان مغناطیسی در حال چرخش قرار دهید، جریان القایی از طریق سیم پیچ شروع به گردش می کند، سپس میدان مغناطیسی ایجاد شده توسط این جریان القایی شروع به چرخش می کند که توسط میدان مغناطیسی کشیده می شود.
میدان مغناطیسی موتور القایی، میدان مغناطیسی در حال چرخش را تولید می کند که دارای چرخه یکسان فرکانس منبع انرژی است. هنگامی که روتور چرخش شده توسط میدان مغناطیسی می چرخد، در واقع تاخیر جزئی (لغزش) رخ می دهد.
در مورد موتورهای همزمان، هنگام قرار دادن روتور متصل شده با آهنربای دائمی در همان میدان مغناطیسی در حال چرخش به عنوان موتورهای القایی، آهنرباهای دائمی به سمت میدان مغناطیسی در حال چرخش کشیده شده و شروع به چرخش هماهنگ با سرعت میدان مغناطیسی دوار می کنند.
موتورهای القایی در محیط سختی مانند گرما، لرزش و ضربه از بین می روند و از دوام بالایی برخوردار هستند. تنظیم مقیاس در مقیاس بزرگ بسیار ساده است زیرا دارای دامنه ظرفیت گسترده ای است.

موتورهای سنکرون با از دست دادن کمی موتور آن، راندمان بالایی از ماشین را درک می کنند. آنها برای دستگاه هایی مناسب هستند که نیاز به دقت بالایی دارند زیرا در برابر تغییر محیط مانند دما قابل انعطاف است. علاوه بر این، این امر نیازهای فزاینده ای برای کاهش اندازه و کاهش وزن را برآورده می کند، زیرا نسبتاً کوچکتر از موتور القایی است.
موتورهای همزمان می توانند بسته به نحوه جذب آهنربای دائمی به روتور، دو نوع موتور متفاوت داشته باشند: موتور SPM (آهنربای دائمی سطح) و موتور IPM (داخلی دائم آهنربا). موتورهای SPM از موتورهای IPM کوچکتر هستند، با این حال، موتورهای IPM برای چرخش سرعت بالا مناسب هستند.
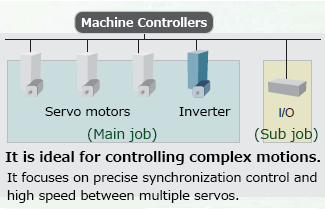
تفاوت بین کنترلر ماشین و PLC
کنترلر ماشین و PLC (کنترل کننده Logic Programmable) هر دو دستگاه کنترل کننده ماشین آلات هستند. PLC به منظور تعویض رله الکترومغناطیسی، مورد استفاده در سیستم اتوماسیون معمولی ایجاد شده است و کنترل را بر اساس سفارش از پیش تعیین شده انجام می دهد. این “کنترل توالی” نامیده می شود.
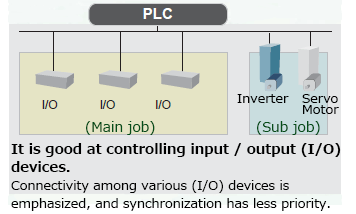
این در حالی است که در سالهای اخیر به ماشین آلات مختلفی نیاز است تا از مزایای فنی بالاتری برخوردار باشند. سپس، یک دستگاه کنترلر دستگاه برای کنترل دستگاههای مختلف که حرکات پیچیده را با سرعت بالا با استفاده از درایوهای سرو و AC انجام می دهند، ایجاد شد.
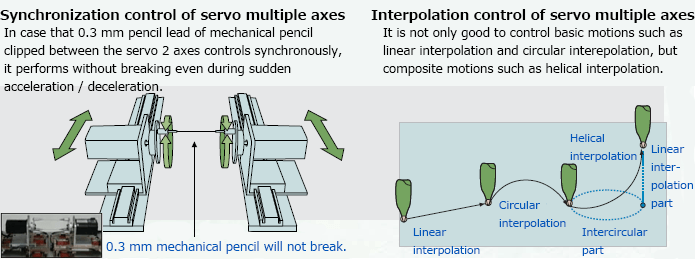
در این زمینه، کنترلر ماشین و PLC اهداف متفاوتی دارند، بنابراین در مشاغل مختلف خوب هستند. کنترل کننده های دستگاه در کنترل حرکات پیچیده در سرعت بالا و با دقت بالا خوب هستند در حالی ک PLC ها در کنترل ورودی / خروجی (I / O) خوب هستند.
انکودر چیست؟
برای درایوهای سرو، یک سنسور موقعیت (انکودر) برای کنترل دقیق حرکت (کنترل حرکت) دستگاه / تجهیزات ضروری است. عملکرد انکودر عنصر مهمی است که نه تنها بر عملکرد کنترل سرو موتور بلکه عملکرد دستگاه / تجهیزات نیز تأثیر می گذارد.
انکودر نیاز به کم شدن دارد زیرا بخشی از دستگاه / تجهیزات همراه با سرو موتور ها خواهد بود، علاوه بر این، باید در برابر لرزش / ضربه و تغییر دما دوام داشته باشد زیرا باید در یک محیط سخت کار کند.
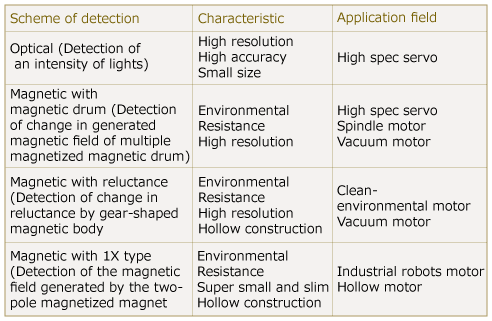
برای طبقه بندی انکودرها که یاسکاوا با روشهای شناسایی توسعه داده است، چند نوع از آنها وجود دارد: انکودر های نوری و رمز گذارهای مغناطیسی (طبل مغناطیسی، اکراه و نوع 1 برابر.)
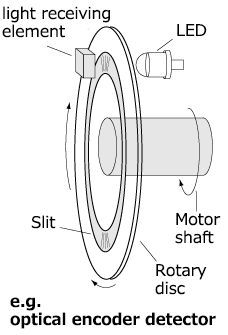
انکودرهای نوری
انکودرهای نوری با وضوح و دقت بالایی به راحتی فهمیده و برای سرو های چرخشی با کارایی بالا مناسب هستند. آنها عناصر دریافت کننده نور را از طریق دیود ساطع کننده نور (LED) از طریق شکافی که روی دیسک چرخان توسط فتو ترانزیستور تنظیم شده است خوانده و با پردازش سیگنال زاویه چرخش را تشخیص می دهند.
با افزایش تعداد شکاف ها می توان وضوح را بهبود بخشید، در عوض باعث می شود قطر دیسک چرخان بزرگتر شود. هنگامی که آنها اطلاعات موقعیت را با خروجی پالس منتقل می کنند، سرعت چرخش مدار یا انتقال پالس را در چرخش سرعت بالا محدود می کند.
سپس با معرفی انتقال سریال که اطلاعات موقعیت را به عنوان داده و انجام فرآیند ضرب و تبدیل فرمت انتقال با ASIC اختصاصی، به تفکیک پذیری بالا و کاهش می یابد بدون افزایش تعداد شکاف ها انجام داد. انکودرهای نوری برای تشخیص موقعیت دو روش دارند:
روش افزایشی که هنگام روشن بودن یک نقطه پایه را تعیین می کند و روش مطلق که اطلاعات جابجایی از مبدا را بدون در نظر گرفتن روشن / خاموش نیرو در اختیار شما قرار می دهد و این اطلاعات را هنگام بازیابی دریافت می کنید.
قدرت روشن است با توسعه ASIC اختصاصی با سرعت پردازش بهبود یافته، یاسکاوا انکودر های افزایشی و مطلق را با وضوح 20bits (تقریباً 1 میلیون پالس / چرخش) توسعه داده است و عملکرد درایوهای سرو را بهبود بخشیده است.
انکودر مغناطیسی
رمز گذارهای مغناطیسی از مقاومت عالی در برابر محیط برخوردارند. در بین انکودرهای مغناطیسی، هم طبل مغناطیسی و هم نوع اکراه قادر به افزایش وضوح هستند، به طوری که موتورهایی مانند موتور اسپیندل برای ابزارهای ماشین و موتورهای خلاء آنها را معرفی می کنند.
در ضمن، انواع 1X در کاهش اندازه، انعطاف پذیری در چرخش با سرعت بالا و ساختار توخالی بسیار عالی هستند، بنابراین در موتورهای میکرو سرو، موتورهای توخالی برای روبات ها و سایر موارد کاربرد دارند. بیایید ببینیم نوع 1X برای کوچک کردن چیست؟
انکودر مغناطیسی از نوع 1X
آنها از مکانیسمی استفاده می كنند كه یك سیگنال، كه میدان مغناطیسی ایجاد شده توسط آهنرباهای مغناطیسی شده به دو قطب توسط سنسور میدان مغناطیسی را تشخیص می دهد، یك چرخه موج سینوسی را با چرخش منفرد (1X: ساختار یک چرخه سیگنال را با چرخش منفرد) تولید می كند.
یک جفت سنسور میدان مغناطیسی (+ A و -A، + B و -B) سیگنال های آنالوگ یک چرخه موج سینوسی یا موج کسین را در چرخش منفرد ایجاد می کنند. با محاسبه محور قوس این سیگنال ها، زاویه چرخش (موقعیت مطلق در یک چرخش) را برمی گرداند.
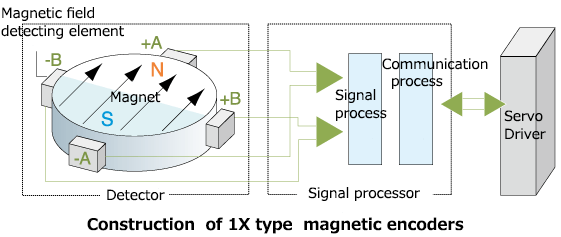
انکودر مغناطیسی از نوع 1X تنظیم شده است تا میدان مغناطیسی پیوسته را تشخیص دهد، به این ترتیب که دقت سیگنال خروجی و وضوح انکودر ممکن است حتی با یک اندازه کوچک افزایش یابد زیرا بستگی به دقت در تشخیص میدان مغناطیسی و پردازش سیگنال.
قسمت پردازش سیگنال آن بدون نصب در موتور قابل جدا شدن است، انکودر از مقاومت در برابر لرزش بسیار خوبی برخوردار است. انکودر همچنین در چرخش با سرعت بالا و ساختار توخالی انعطاف پذیر است.
آموزش سرو یاسکاوا (servo yaskawa)
موتور سرو یاسکاوا وسیله ای الکتریکی است که می تواند با دقت بسیار زیاد جسم را فشار داده یا بچرخاند. اگر می خواهید در برخی از زوایای خاص و یا مسافت خاص شی ای را بچرخانید پیشنهاد ما به شما استفاده از موتور سرو یاسکاوا می باشد.

حال این موضوع ذهن برخی از افراد را درگیر کرده است که موتور سرو یاسکاوا را چگونه باید استفاده کرد. مکانیزم سرو یاسکاوا بدین صورت می باشد که این دستگاه از 3 قسمت مجزا تشکیل شده است که شامل:
- دستگاه کنترل شده
- سنسور خروجی
- سیستم بازخورد
موتور سرو یاسکاوا در واقع یک سیستم حلقه بسته است که در آن از سیستم بازخورد مثبت برای کنترل حرکت و وضعیت نهایی شافت استفاده می شود. در اینجا دستگاه با استفاده از سیگنال بازخورد تولید شده با مقایسه سیگنال خروجی و سیگنال ورودی مرجع کنترل می شود.
برای اینکه بتوان به صورت صحیح و درست از موتور سرو یاسکاوا استفاده کرد باید دوره های آموزش سرو یاسکاوا را به صورت آنلاین در سایت و به صورت عملی در تعمیرگاه ها گذراند.
آموزش سرو یاسکاوا شامل چگونگی عملکرد این موتور در شرایط مختلف است و این آموزش سرو یاسکاوا می تواند در تعمیرات و راه اندازی این موتور نقش بسزایی داشته باشد. افراد برای اینکه بتوانند به صورت کامل استفاده از موتور سرو را یاد بگیرند باید دوره های سرو یاسکاوا را بگذرانند.
آموزش سرو یاسکاوا علاوه بر نحوه عملکرد این موتور، شرایط محیطی نگهداری از این دستگاه را نیز آموزش می دهد و نشان می دهد که این دستگاه در چه شرایطی بهترین عملکرد و راندمان را دارد. همچنین آموزش سرو یاسکاوا نحوه ی نگهداری از این دستگاه را نیز آموزش داده و باعث می شود تا عمر دستگاه نیز افزایش یابد.
به توجه به موارد گفته شده و پیچیدگی موتور های سرو به این نتیجه میتوان رسید که گذراندن دوره های آموزش سرو یاسکاوا بسیار مهم بوده و در طول عمر دستگاه و کارکرد مناسب آن تاثیر زیادی دارد.
فروش سرو یاسکاوا
سرو یاسکاوا از جمله لوازمی است که در صنعت بسیار کاربرد دارد و به علت مرغوبیت کالای این شرکت از طرفداران و علاقه مندان زیادی برخوردار است. در واقع برای خرید این موتورها میتوان با مراجعه به نمایندگی های فروش سرو یاسکاوا این دستگاه را خریداری کرد.
نمایندگی های فروش سرو یاسکاوا با داشتن استاندارد های لازم این اطمینان را به مشتریان می دهند تا خریدی آسان و مطمئن داشته باشند و از اصالت کالای خریداری شده اطمینان حاصل کنند.

نمایندگی های فروش سرو یاسکاوا در تمامی نقاط جهان اقدام به ارائه سرویس برای مشتریان می کنند و با تامین قطعات جانبی اصلی خدمات پس از فروش این دستگاه را نیز پشتیبانی می کنند.
این نمایندگی های فروش سرو یاسکاوا تمامی قطعات سرو یاسکاوا را در اختیار دارند در صورت بروز هرگونه مشکلی می توانند با تامین قطعات اصلی و شرکتی مشکل بوجود آمده در موتور سرو یاسکاوا را حل کنند.
مشتریان نیز می توانند با مراجعه به وبسایت های نمایندگی فروش سرو یاسکاوا یا مراجعه ی حضوری به نمایندگی های فروش سرو یاسکاوا اقدام به خرید کرده و در صورتی که محصول خریداری شده به مشکل خورده باشد این نمایندگی های فروش سرو یاسکاوا با قبول مسئولیت مشکل بوجود آمده را رفع می کنند.
کاتالوگ سرو یاسکاوا
تمامی دستگاه های الکترونیکی دارای کاتالوگ استفاده هستند. سرو یاسکاوا نیز مانند دیگر قطعات دارای کاتالوگ سرو یاسکاوا در زبان اصلی است و برای استفاده در کشور ایران نیز کاتالوگ فارسی سرو یاسکاوا موجود است. کاتالوگ سرو یاسکاوا دارای نکات متعددی برای نگهداری و نحوه ی راه اندازی دستگاه است.
در کاتالوگ فارسی سرو یاسکاوا که به زبان فارسی برای کشور ایران و تمامی فارسی زبان تدارک دیده شده است نیز ترجمه کاتالوگ سرو یاسکاوا به زبان اصلی نوشته شده می باشد و برای استفاده در کشور های فارسی زبان تهیه شده است و در واقع هیچ تفاوتی با نسخه های اورجینال و اصلی ندارد.
در کاتالوگ سرو یاسکاوا اطلاعات هر دستگاه نیز آورده شده است تا افرادی که اطلاعات کافی در مورد دستگاه ندارند بتوانند با مراجعه به کاتالوگ فارسی سرو یاسکاوا اطلاعات لازم در مورد دستگاه را به دست بیاورند.
کاتالوگ سرو یاسکاوا با تهیه اطلاعات دستگاه و روش های نگهداری از آن و نحوه ی راه اندازی دستگاه در شرایط مختلف اطلاعات ارزشمندی را در مورد سرو یاسکاوا در اختیار مشتریان قرار داده و باعث می شود تا مشتریان با مراجعه به کاتالوگ فارسی سرو یاسکاوا بتوانند به اطلاعات مهمی در مورد دستگاه خریداری شده دست یابند.
همچنین کاتالوگ سرو یاسکاوا برای معرفی انواع محصولات شرکت نیز مورد استفاده قرار می گیرد و این امکان را به مشتریان می دهد تا با مراجعه به کاتالوگ فارسی سرو یاسکاوا قبل از خرید از اطلاعات محصول با خبر شوند.
کاتالوگ سرو یاسکاوا با ارائه انواع مدل های سرو یاسکاوا باعث می شود تا خریداران انتخابی صحیح به نسبت نیاز خود داشته باشند و هر خریداری که به کاتالوگ فارسی سرو یاسکاوا مراجعه می کند و خریدی با توجه به اطلاعات کاتالوگ انجام می دهد از محصول خریداری شده خود رضایت کامل را داشته باشد.
کافی است برای کسب اطلاعات بیشتر در مورد نحوه خرید اینورتر صنعتی یا مشاوره قبل از خرید با تلفن های درج شده در سایت تماس حاصل فرمایید.


